
BlueBoy
I started research and found a great looking bot that was unlike the others. Most balancing bots are short and low to the ground, but I found one that was about 2-1/2 feet (75 cm) tall called Red. He ran amazingly smooth, a testimony to very good code, and was more "human-like" than the others.
Red used a PS/2 controller and regular DC motors, but I decided to make BlueBoy taller, with stepper motors, and whatever controller was most useful at the time.
I changed my mind about 20 times regarding MCU processor to use since I had a good stock of them to choose from: UNO, Nano, Due, Mega, ProMini, Teensy, ESP32, ESP8266. My choice depended on the code I could find to get me started.
Tuesday, October 11, 2022
I've wanted to build a balancing robot for many years and 5-6 years ago bought a couple kits that proposed to do just that. They did not work very well. Both had used normal DC motors, and the code was over-simplified. All balance bots require PID (proportional, integral and derivative) control algorithms to operate properly.I started research and found a great looking bot that was unlike the others. Most balancing bots are short and low to the ground, but I found one that was about 2-1/2 feet (75 cm) tall called Red. He ran amazingly smooth, a testimony to very good code, and was more "human-like" than the others.
Red used a PS/2 controller and regular DC motors, but I decided to make BlueBoy taller, with stepper motors, and whatever controller was most useful at the time.
I changed my mind about 20 times regarding MCU processor to use since I had a good stock of them to choose from: UNO, Nano, Due, Mega, ProMini, Teensy, ESP32, ESP8266. My choice depended on the code I could find to get me started.
Send Comments
Possible MCUs to use
PJRC Teensy3.2 or Teensy4.0
Exprissif ESP32 or ESP8266
TESTED: UNO, Nano, Due, Mega, Leonardo, UNO-wifi2
USED: UNO and Nano
Tuesday, October 11, 2022
Arduino UNO, Nano, Due, Mega, ProMini, UNO-wifi2, LeonardoPJRC Teensy3.2 or Teensy4.0
Exprissif ESP32 or ESP8266
TESTED: UNO, Nano, Due, Mega, Leonardo, UNO-wifi2
USED: UNO and Nano
Possible remote controls to use
Arduino joystick (for Mega or UNO)
Custom joystick
Wii Nunchuk
Old TV remote control (IR)
Android or Apple App for tablet or iPad (I don't have a phone).
TESTED: all of them
USED: Nunchuk
Tuesday, October 11, 2022
PS/2Arduino joystick (for Mega or UNO)
Custom joystick
Wii Nunchuk
Old TV remote control (IR)
Android or Apple App for tablet or iPad (I don't have a phone).
TESTED: all of them
USED: Nunchuk
Possible communication devices
433 MHz RF
HC-12 transceivers
wifi (various)
nRF24L01 2.4GHz RF
TESTED: all of them
USED: HC-12 transceivers
Tuesday, October 11, 2022
Bluetooth HC-05433 MHz RF
HC-12 transceivers
wifi (various)
nRF24L01 2.4GHz RF
TESTED: all of them
USED: HC-12 transceivers
Items must use
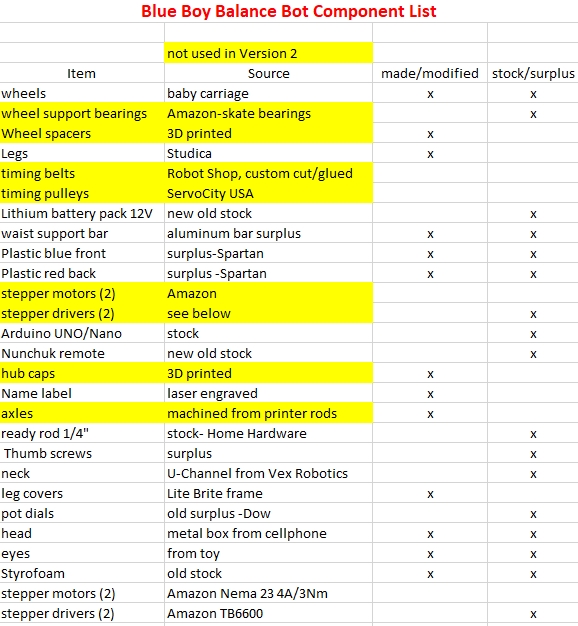
Nema 23 Stepper motors
Lithium batteries
TB6600 stepper motor drivers
Arduino IDE
Tuesday, October 11, 2022
MPU6050 gyroscope/accelerometerNema 23 Stepper motors
Lithium batteries
TB6600 stepper motor drivers
Arduino IDE

")


Copyright 2022 Queenidog - All Rights Reserved
Printed Circuit Board
Wednesday, October 12, 2022
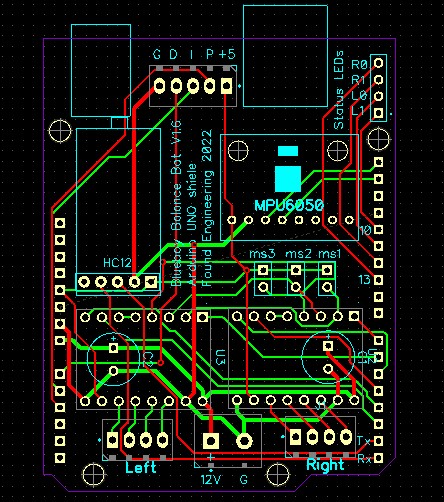
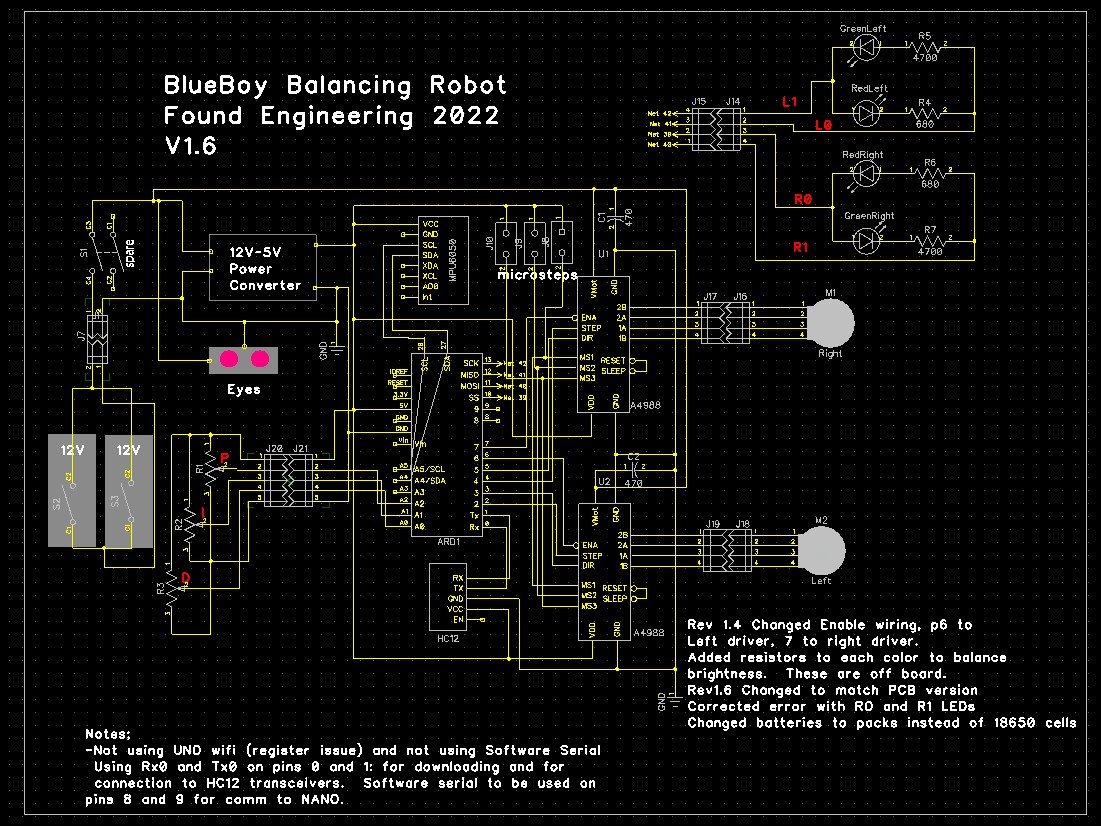
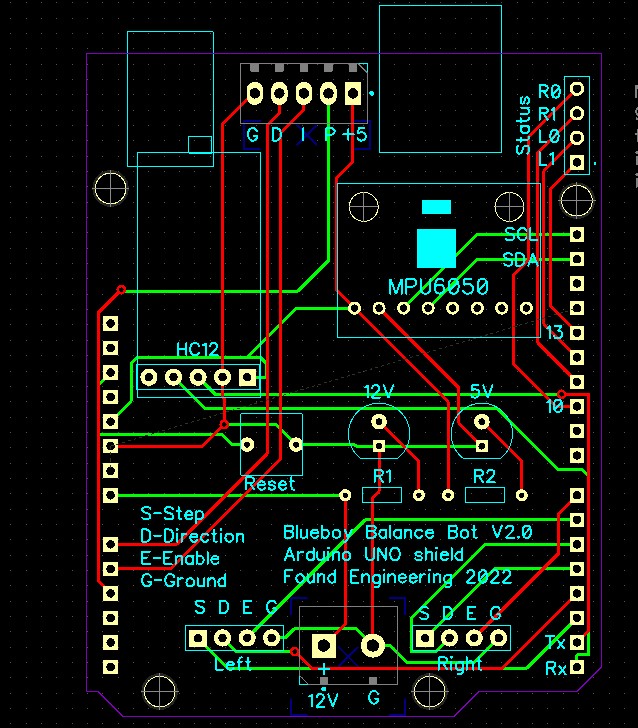
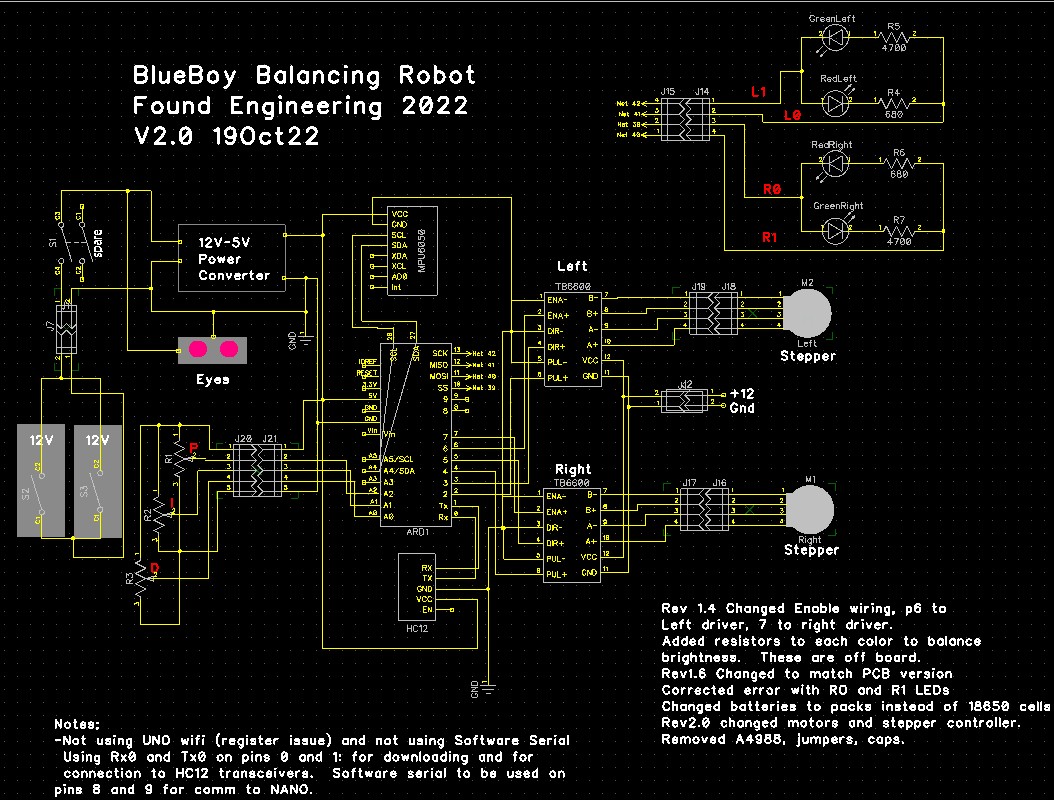
After breadboarding and testing all parts of the circuit, I made a PCB that fit onto an UNO development board. There are two versions: V1.0 and V2.0, the latter due to stepper motor driver changes. Both are shown below, with schematics.
Why BlueBoy?
With apologies to Gainsborough who painted the "original" Blueboy, I named my bot, because...well, he's blue! I based his shape and color on a balance bot named Red. (Click photo below to see video)
With apologies to Gainsborough who painted the "original" Blueboy, I named my bot, because...well, he's blue! I based his shape and color on a balance bot named Red. (Click photo below to see video)

Red


.")












V1.0 using A4988 Stepper motor drivers
V2.0 using TB6600 Stepper motor drivers
Basic construction

After a few months of work with revisions along the way, I realized that using timing belts to drive wheels 18" away was NOT going to work. There was too much "play" in the entire drive system, except for the stepper motor - it was steady as a rock of course. This would not work well with the control code that has to compensate for any movement.
So... I had to bite the bullet and remove all this offset and drive the wheels directly . I then suspected I would need more power and my little Nema 17 motors would not do the trick, so I upgraded to a set of Nema 23 motors with impressive torque numbers: 269 oz-in or 1.9Nm.
More motor power requires increased current and my small A4988 drivers would not fit the bill (they are rated for 2 amps, I need 4 amps minimum). I had to replace them with two larger controllers I had purchased for another project. The signal connections were also different so my UNO PCB shield was not going to work. I could have jerry-rigged the board, but this is not good for reliability, so I made another one.
My first attempts at all this are on the page: BlueBoy V1.0. This page is V2.0.
These are the changes: (V2.0 on left, V1.0 on right): (hover for description)
So... I had to bite the bullet and remove all this offset and drive the wheels directly . I then suspected I would need more power and my little Nema 17 motors would not do the trick, so I upgraded to a set of Nema 23 motors with impressive torque numbers: 269 oz-in or 1.9Nm.
More motor power requires increased current and my small A4988 drivers would not fit the bill (they are rated for 2 amps, I need 4 amps minimum). I had to replace them with two larger controllers I had purchased for another project. The signal connections were also different so my UNO PCB shield was not going to work. I could have jerry-rigged the board, but this is not good for reliability, so I made another one.
My first attempts at all this are on the page: BlueBoy V1.0. This page is V2.0.
These are the changes: (V2.0 on left, V1.0 on right): (hover for description)

(Click to link)