SCARA Robot Arm
SCARA: Selective Compliance Assembly Robot Arm
This sounds like someone trying to use big words to describe an object that is obviously a robot arm, but there was actually a consortium of 13 Japanese companies with sole purpose to improve on robots at the time (1977) and do research. Go here for more information: What is a SCARA robot?


This is another How-to-Mechatronics project, the same people who provided the Perseverance project files. Their website: How-To-Mechatronics
Introduction
The 3D printing worked out well, including the timing gears with those little cogs. Came out perfect off the build plate.
The major change I made was building a bigger box for the Arduino MCU board. I had lots of issue with the gripper, getting the right length screws so they wouldn't interfere with other parts. Lots of issues at first not understanding how forward kinematics and reverse kinematics worked.
Saturday, June 15, 2024
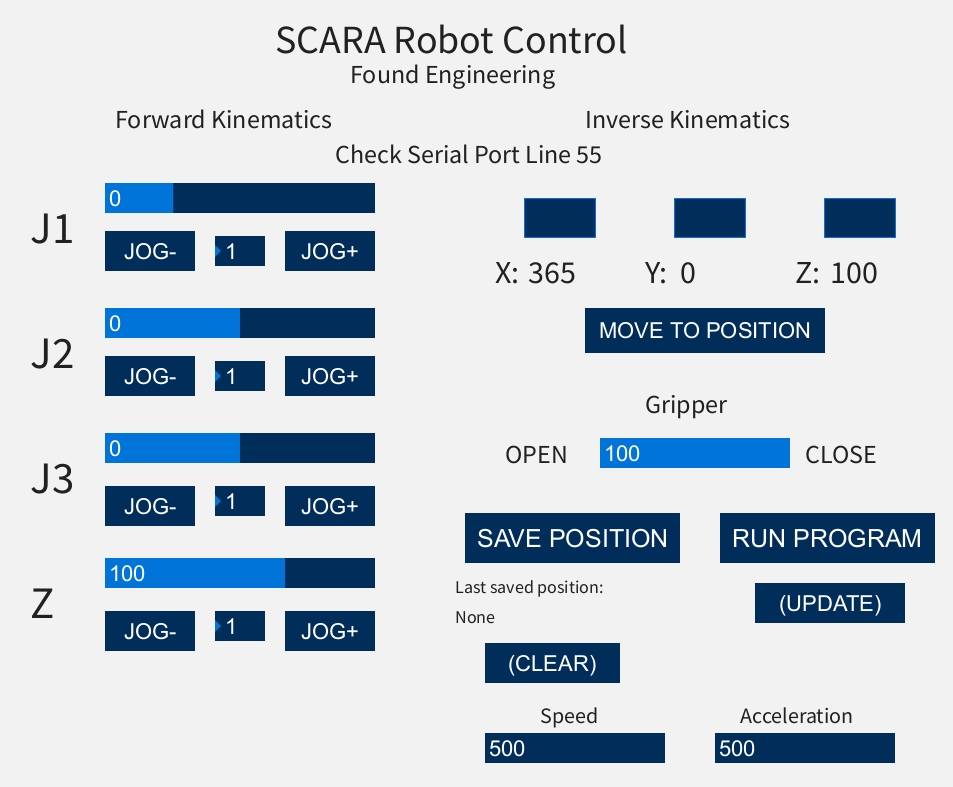
This was an exceptionally rewarding project because everything went so well. There were the usual "how does this fit?" or "why did he do it that way", but generally the robot arm I made is 95% original. A big bonus is that it uses Processing program language to make a control panel with values shared back and forth to the Arduino processor. I had to learn how to use it and have since learned a little bit about the programming.The 3D printing worked out well, including the timing gears with those little cogs. Came out perfect off the build plate.
The major change I made was building a bigger box for the Arduino MCU board. I had lots of issue with the gripper, getting the right length screws so they wouldn't interfere with other parts. Lots of issues at first not understanding how forward kinematics and reverse kinematics worked.
Send Comments



















New stuff I learned
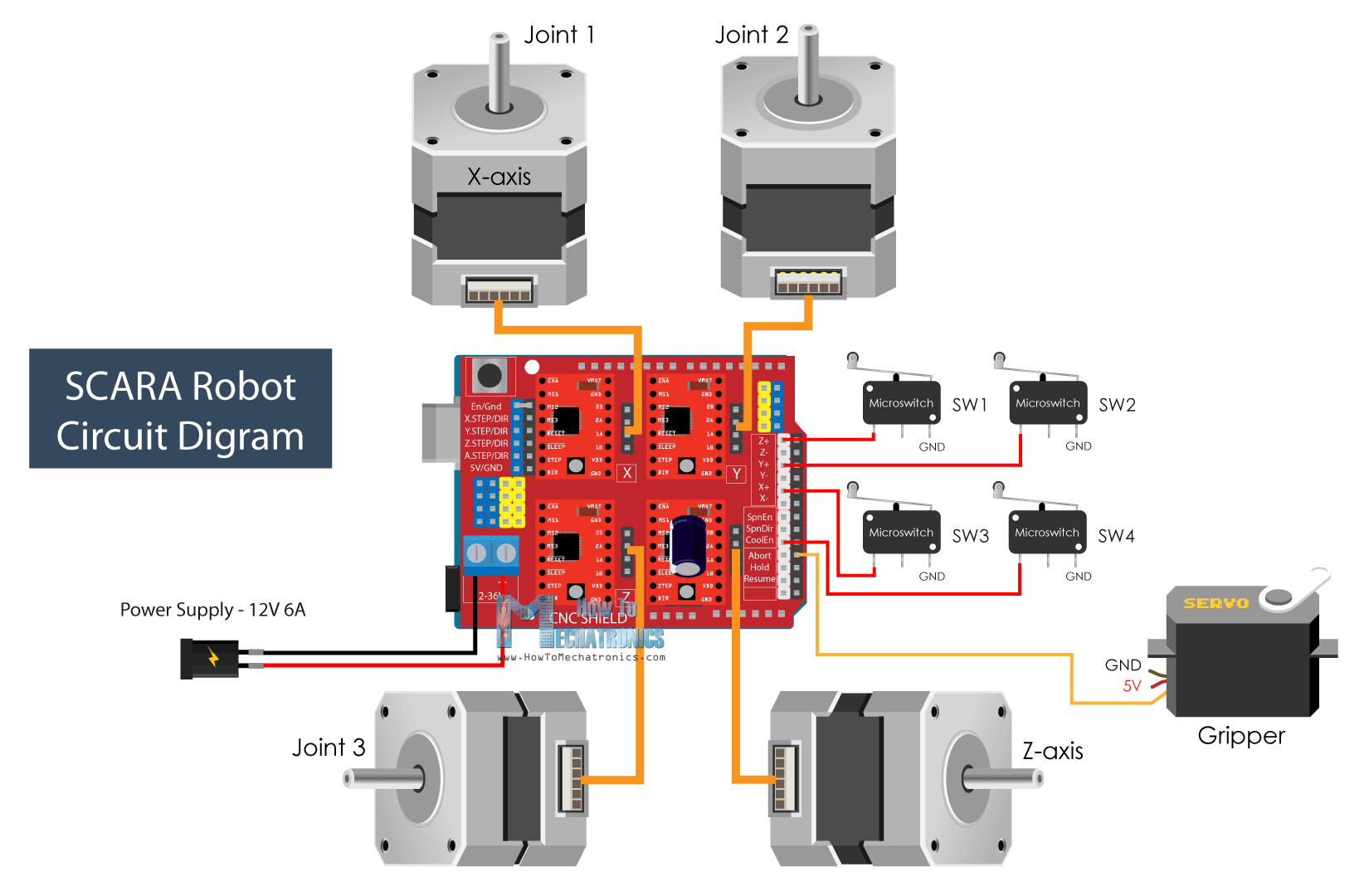
- Using CNC shield (with 4xA4988 drivers) with Arduino UNO
- Making timing gears and using timing belts
- Using and programming Processing code
- Use of a screw rod (Z-axis)
Saturday, June 15, 2024
- Using CNC shield (with 4xA4988 drivers) with Arduino UNO
- Making timing gears and using timing belts
- Using and programming Processing code
- Use of a screw rod (Z-axis)
Sequence of build:
- Determine if this can be built
- - Order materials
- - Print 3D parts (STL)
- - Begin assembly
- - Install control electronics
- - Download control software, verify good compile
- - Run and configure Processing app, for the GUI
- - Test
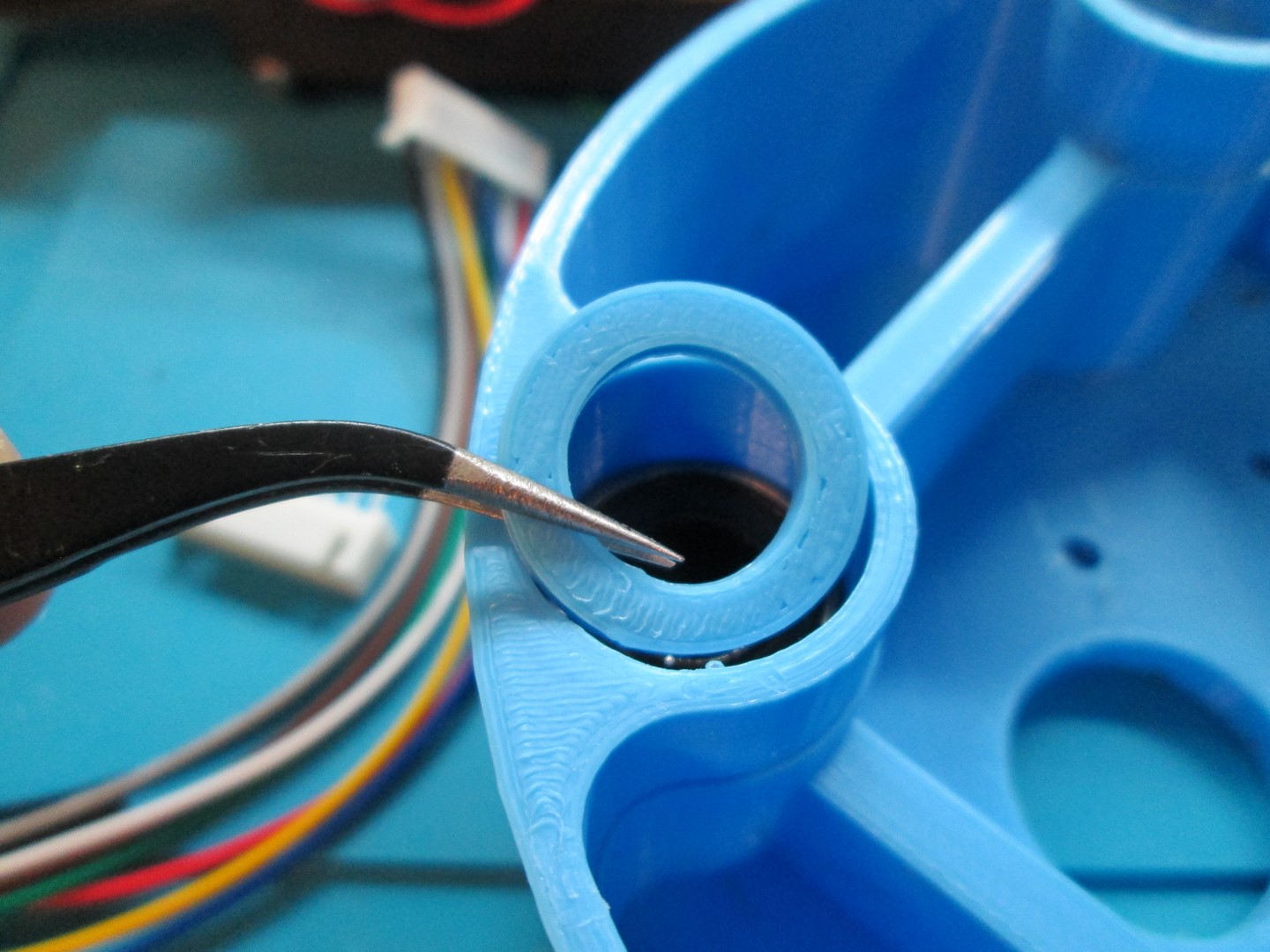
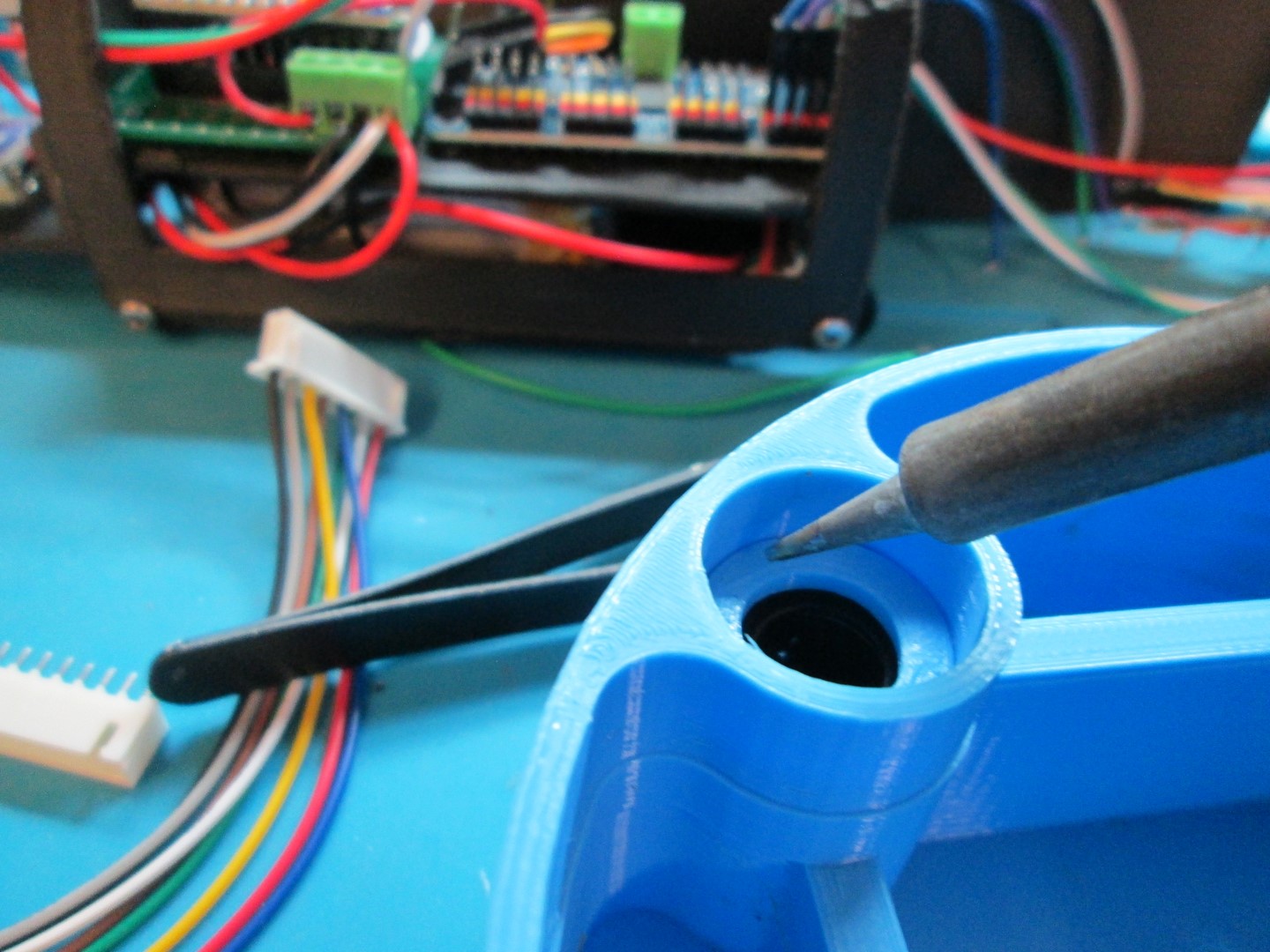
The linear bearings for the X-axis rods were too loose in the support hole I made for them, because I had overcompensated the 3D print software (Cura) for hole contraction. So I made these washers that fit on top of the bearings and used a soldering iron to "weld" them in place.